
GEMINI
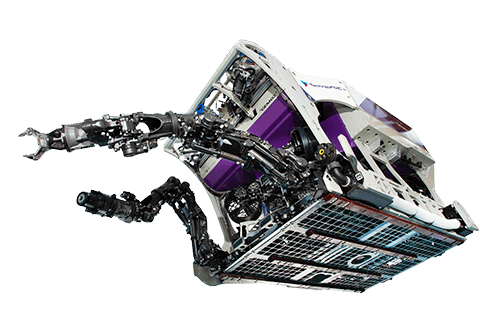
TechnipFMC has launched its new Gemini Workclass ROV. This incorporates a number of innovative features including a tooling carousel designed to be accessed by a pair of newly-developed manipulators.

Depths
Working at extreme depths, the journey between the surface and the work site can take hours. When at the workface, the vehicle may require a large number of different tools.

On the Gemini ROV the manipulators are located either side of the revolving carousel. This means that the manipulator control software always knows the exact location of the designated slot from which to select the correct tool. As both are part of the ROV, this position will not vary. Accessing the carousel tooling on the TMS, however, is far more challenging.
The TMS is suspended from the surface support vessel via the steel umbilical, however, the motion of the TMS is controlled via an active heave compensated Launch and Recovery System. This limits the motion of the TMS to a point where Gemini’s machine vision cameras can lock on to the target tool and automatically acquire it.
In addition to the machine vision technology, Gemini’s positional control and stability are enabled by a range of third party navigational tools including its Valeport miniIPS Depth Sensor, the IXBLUE OCTANS NANO motion reference unit and the Teledyne RDI Pioneer 600 kHz Doppler Velocity log.

STATIONKEEP
Maintaining position in the water column requires a variety of sensors feeding to a software-driven control centre called StationKeep. The latest version – StationKeepV2 – incorporates additional ROV sensor inputs and a state estimator, enhancing the overall accuracy.
It gives the ROV the ability to maintain vehicle position within a 1in (25 mm) watch circle in currents exceeding 2 kts. Once the ROV is stationary, five machine vision cameras on the vehicle, including two on the manipulators themselves, assist in getting the ROV and manipulator in the correct position. The final, decision on precisely when to conduct the actual operation is that of the pilot.
Once positioned and ready to interface with the target, the system is capable of rapidly acquiring or stowing a tool on the TMS, and the designers coined the term ‘Cobra strike’ for the final, critical action.
An additional new feature is the adoption of a PlayStation-type joystick for manipulator control.
It is only necessary for the pilot to concentrate on the tip of the tool and move the joystick in Cartesian mode XYZ axes. In the background, the artificial intelligence in the machine is ensures the rest of the tool is at the correct angle. The pilot is also aided by a visual target engagement indicator. Once a signal light turns green, the system becomes locked on and ready to commence the action and the tool, say, is inserted into the receptacle in seconds.
It is the ultimate demonstration of the ROV and the manipulator arm all working together under control of marine machine vision technology in the most challenging of circumstances.

FORCE COMPLIANCE
In the world of animation, the tool will enter the receptacle seamlessly, but in reality the even a slight change in angle in any direction means that pushing against this offset can create a tremendous amount of force, possibly causinges the entire ROV to rebound backwards. Worse, it can damage the hot stab or receptacle.
The solution that Schilling devised to resolve this issue is called force compliance. As the tool is pushed forward, sensors distributed 360deg around the wrist, detects movement resistance. The control system then instructs the wrist to automatically microadjust the tool angle and, using the sensor information, realign it with the receptacle. As resistance falls to zero, the tool can be inserted further. These fine microadjustments are carried out autonomously, leaving the pilot to concentrate on work of inserting the tool correctly.
ISOL-8
Executing the sort of underwater operations that the Gemini is called upon to perform requires both high power and the ability to pump large amounts of fluid. The main HPU is a 250 hp system but the vehicle also houses an auxiliary HPU called ISOL8 a carry over the UHD units
If these pumps were required to deliver the pressure and flow desired. If the operator said it needed an output of 50 gpm at 5,000 psi (189 lpm at 345 Bar), sufficient to actuate BOP shear rams, shear and seal, in 45 seconds or less as specified by API 53. The user simply dials the details into the control console and the pump automatically produces that sort of pressure and flow without having to make any mechanical or hydraulic configuration changes.
It can pump hydraulic fluid, water glycol or seawater, thus offering fully independent pressure and flow control of each hydraulic circuit through the onboard Schilling Robotics multi-function valve packs.
